жң¬её–жңҖеҗҺз”ұ иҒ”еҗҲе…ү科 дәҺ 2022-3-16 14:05 зј–иҫ‘
жҲҗеғҸй•ңеӨҙжҳҜйӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipдә§е“Ғзҡ„йҮҚиҰҒзҡ„з»„жҲҗйғЁеҲҶпјҢе®ғзҡ„дҪңз”ЁжҳҜе°Ҷзӣ®ж Үзү©дҪ“жҲҗеғҸеңЁеӣҫеғҸдј ж„ҹеҷЁдёҠгҖӮжң¬ж–Үе°ҶеҜ№жҲҗеғҸй•ңеӨҙзҡ„еҸӮж•°е’ҢжңҜиҜӯиҝӣиЎҢиҜҙжҳҺи§ЈйҮҠпјҢеё®еҠ©жҲ‘们жӣҙеҘҪзҡ„зҗҶи§Јй•ңеӨҙзҡ„жҖ§иғҪзү№зӮ№пјҢй’ҲеҜ№дёҚеҗҢзҡ„еә”з”ЁеңәжҷҜе®ҢжҲҗй•ңеӨҙзҡ„йҖүеһӢжҗӯй…ҚгҖӮ
з„Ұи·қпјҡ
е®ҡд№үпјҡз„Ұи·қжҳҜжҢҮй•ңеӨҙзҡ„йӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipдёӯеҝғпјҲйӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipеҗҺдё»зӮ№пјүеҲ°жҲҗеғҸйқўз„ҰзӮ№зҡ„и·қзҰ»пјҢз„Ұи·қжҳҜйӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipзі»з»ҹдёӯиЎЎйҮҸе…үзҡ„иҒҡйӣҶжҲ–еҸ‘ж•Јзҡ„еәҰйҮҸж–№ејҸгҖӮ
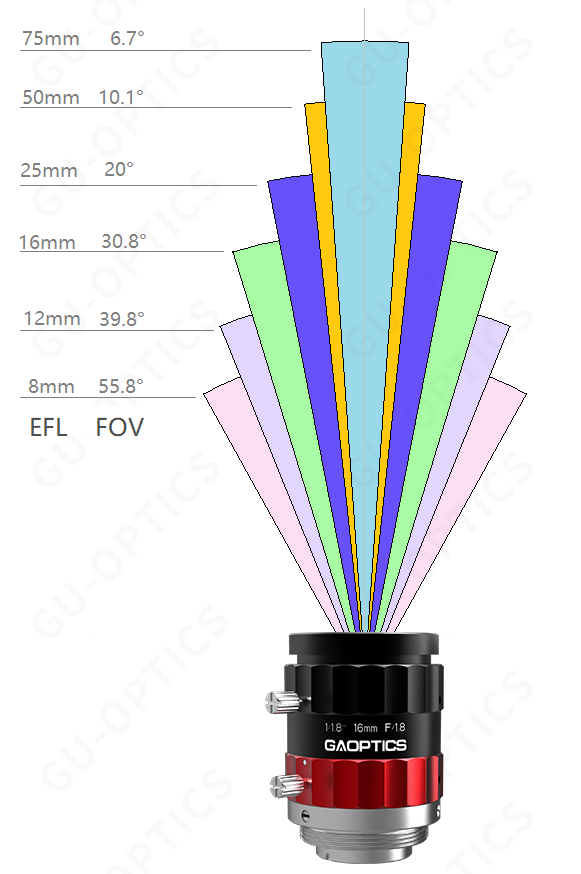
е№іиЎҢе…үйҖҡиҝҮй•ңеӨҙжұҮиҒҡдәҺдёҖзӮ№пјҢиҝҷдёӘзӮ№е°ұжҳҜжүҖиҜҙзҡ„з„ҰзӮ№пјҢжҳҜй•ңеӨҙзҡ„йҮҚиҰҒжҖ§иғҪжҢҮж ҮгҖӮдёҖиҲ¬еёёз”Ёзҡ„е·Ҙдёҡй•ңеӨҙзҡ„з„Ұи·қдёә8mmгҖҒ12mmгҖҒ16mmгҖҒ25mmгҖҒ35mmгҖҒ50mmзӯүгҖӮз„Ұи·қзҡ„еӨ§е°ҸеҶіе®ҡзқҖи§Ҷеңәи§’зҡ„еӨ§е°ҸпјҢз„Ұи·қж•°еҖје°ҸпјҢи§ӮеҜҹзҡ„иҢғеӣҙеӨ§пјӣз„Ұи·қж•°еҖјеӨ§пјҢи§Ҷеңәи§’е°ҸпјҢи§ӮеҜҹиҢғеӣҙе°ҸгҖӮ
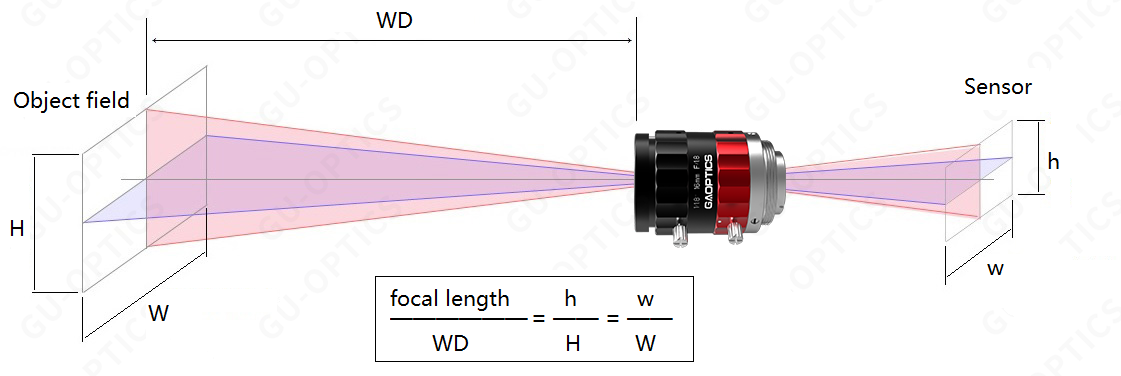
еҰӮдҪ•йҖүжӢ©еҗҲйҖӮзҡ„з„Ұи·қзҡ„е®ҡз„Ұй•ңеӨҙпјҹиҜ·зңӢй•ңеӨҙе·ҘдҪңи·қпјҢзҰ»з„Ұи·қпјҢдј ж„ҹеҷЁе’Ңи§ҶйҮҺе°әеҜёзҡ„и®Ўз®—е…ізі»гҖӮ
еӣҫ1пјҡй•ңеӨҙз„Ұи·қдёҺе·ҘдҪңи·қзҰ»йҖүжӢ©
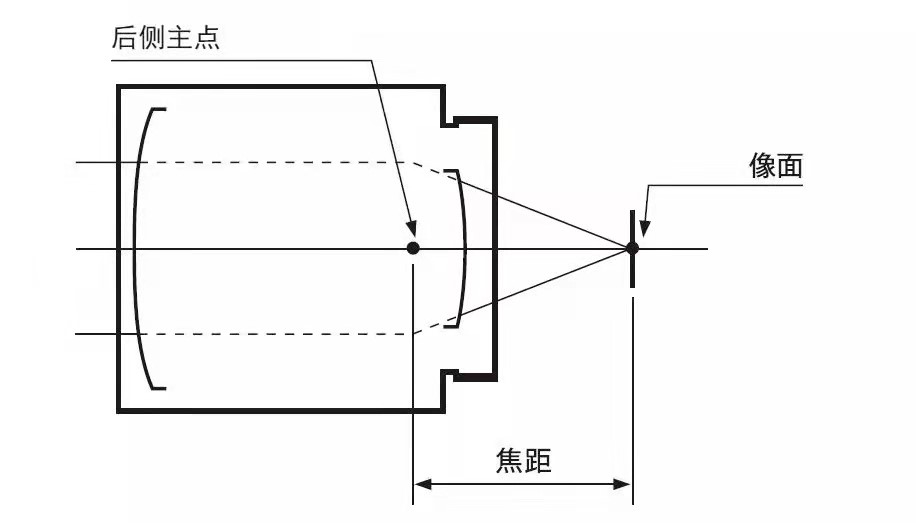
еҗҺз„Ұи·қпјҡй•ңеӨҙжңҖеҗҺдёҖдёӘй•ңзүҮиЎЁйқўйЎ¶зӮ№еҲ°з„ҰзӮ№зҡ„и·қзҰ»гҖӮеӣ еҜ№з„Ұж—¶й•ңеӨҙеҗҺй•ңзүҮеҸҜиғҪ移еҠЁпјҢдёҖиҲ¬ж ҮжіЁж— з©·иҝңеҜ№з„Ұж—¶зҡ„еҗҺз„Ұи·қпјҢд№ҹе°ұжҳҜжңҖе°ҸеҗҺз„Ұи·қпјҢжңүйҷҗи·қзҰ»жҲҗеғҸж—¶еҗҺз„Ұи·қдјҡеўһеӨ§гҖӮ
2.е…үеңҲдёҺжҷҜж·ұпјҡ
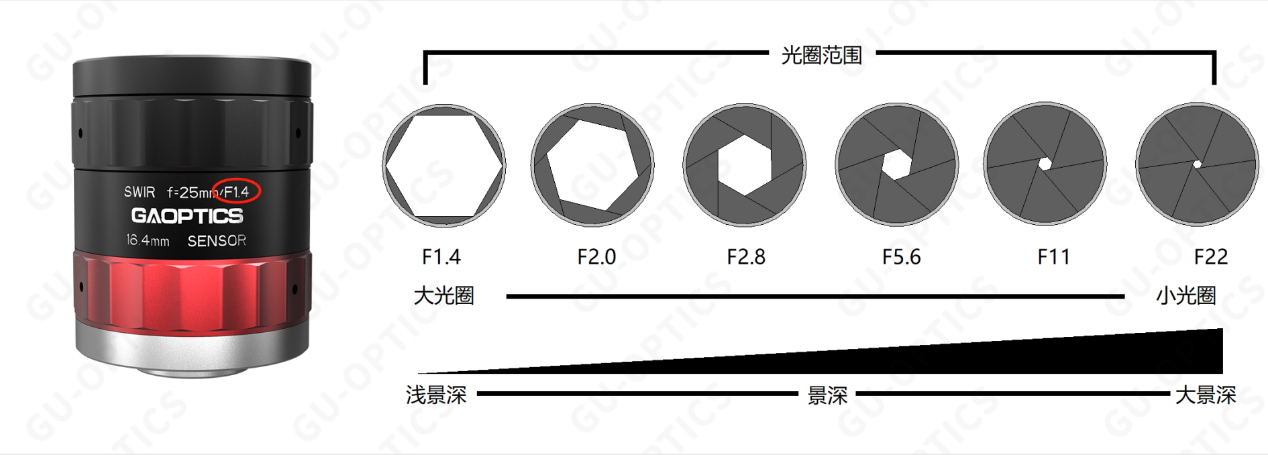
е…үеңҲе®ҡд№үпјҡе…үеңҲFеҖјеҸҲз§°дёәе…үеңҲж•°пјҢжҳҜй•ңеӨҙз„Ұи·қдёҺжңүж•Ҳеӯ”еҫ„(еҚіе…үеңҲ)д№ӢжҜ”гҖӮ
FеҖјиЎЎйҮҸйӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipзі»з»ҹйҖҡе…үйҮҸзҡ„еӨ§е°ҸгҖӮFеҖји¶Ҡе°Ҹиҝӣе…Ҙзі»з»ҹзҡ„е…үзәҝе°ұи¶ҠеӨҡпјҢеӣҫеғҸдә®еәҰи¶Ҡй«ҳгҖӮ
еӣҫ2пјҡе…үеңҲдёҺжҷҜж·ұ
дёҖиҲ¬й•ңеӨҙдјҡж ҮжіЁжңҖе°Ҹе…үеңҲж•°пјҢеҚіжңҖеӨ§йҖҡе…үеӯ”еҫ„гҖӮеҰӮF1.4пјҢF1.8пјҢF2.0зӯүгҖӮ
е…үеңҲзҡ„и°ғиҠӮдјҡжңүдёӨдёӘдё»иҰҒеҪұе“ҚпјҡжҲҗеғҸдә®еәҰдёҺжҷҜж·ұгҖӮ
е…үеңҲи¶ҠеӨ§пјҢиҝӣе…Ҙзі»з»ҹзҡ„е…үзәҝи¶ҠеӨҡпјҢеӣҫеғҸдә®еәҰи¶Ҡй«ҳпјӣе…үеңҲи¶Ҡе°ҸпјҢиҝӣе…Ҙзі»з»ҹзҡ„е…үзәҝи¶Ҡе°‘пјҢеӣҫеғҸи¶Ҡжҡ—гҖӮ
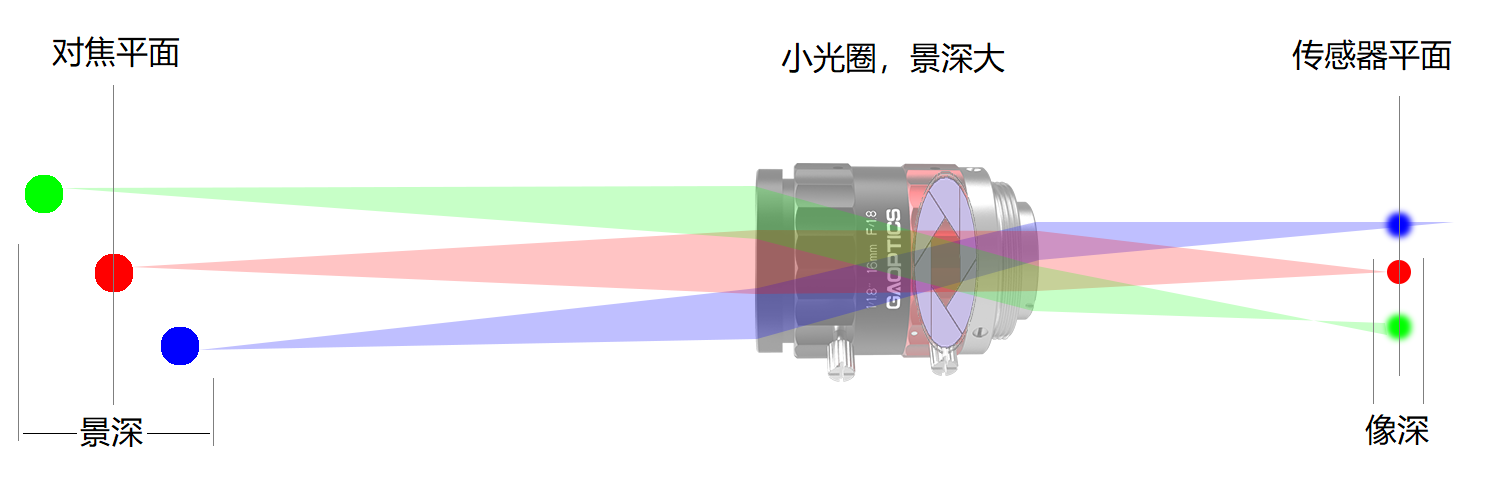
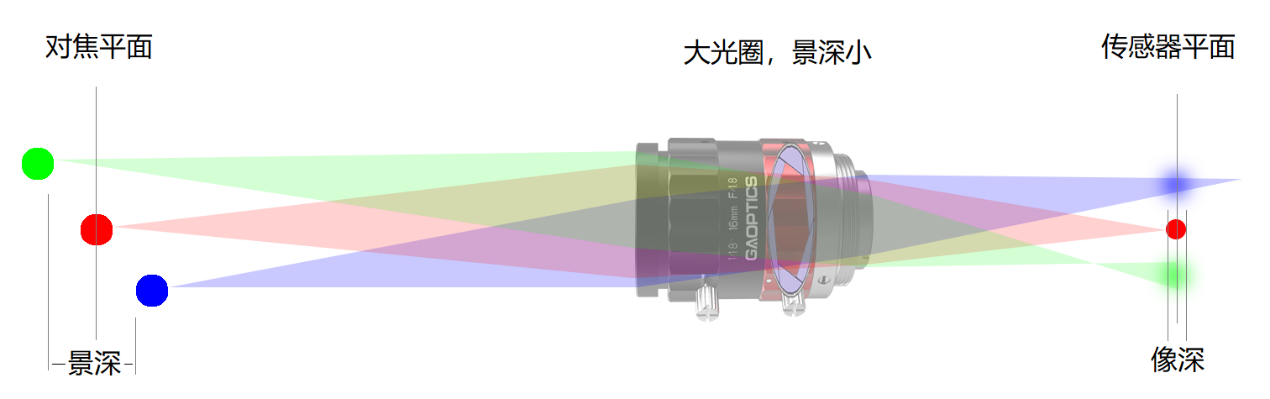
е…үеңҲи¶ҠеӨ§пјҢжҷҜж·ұи¶Ҡе°ҸпјҢиҷҡеҢ–жҳҺжҳҫпјӣе…үеңҲи¶Ҡе°ҸпјҢжҷҜж·ұи¶ҠеӨ§гҖӮ
еӣҫ3пјҡеӨ§е…үеңҲйҖҡе…үйҮҸеӨ§пјҢжҷҜж·ұе°ҸиҷҡеҢ–жҳҺжҳҫ
жҷҜж·ұе®ҡд№үпјҡ
й•ңеӨҙеҜ№жҹҗдёҖзү©е№ійқўеҜ№з„ҰеҗҺпјҢеңЁеҜ№з„Ұе№ійқўзҡ„еүҚеҗҺйғҪжңүдёҖж®өиғҪжё…жҷ°жҲҗеғҸзҡ„иҢғеӣҙпјҢеҲҶеҲ«з§°дёәеүҚжҷҜж·ұе’ҢеҗҺжҷҜж·ұгҖӮжҷҜж·ұ=еүҚжҷҜж·ұ+еҗҺжҷҜж·ұпјӣ 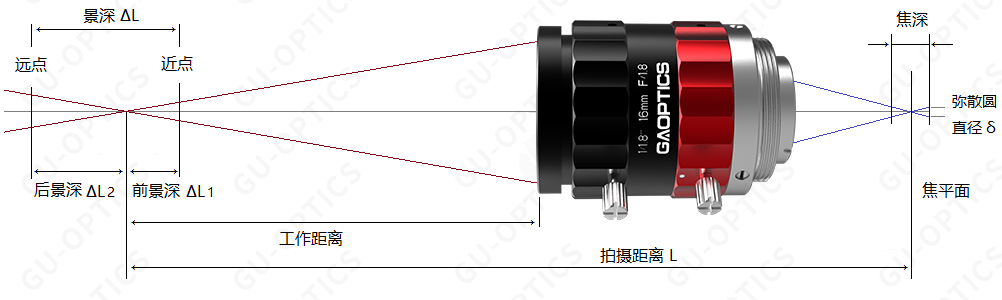 еӣҫ4пјҡжҷҜж·ұдёҺз„Ұж·ұ
еӣҫ4пјҡжҷҜж·ұдёҺз„Ұж·ұ
жҲҗеғҸе…үжқҹжңӘдјҡиҒҡдәҺдёҖзӮ№пјҢеңЁеғҸе№ійқўдёҠеҪўжҲҗдёҖдёӘжү©ж•Јзҡ„еңҶеҪўжҠ•еҪұпјҢз§°дёәејҘж•ЈеңҶгҖӮ
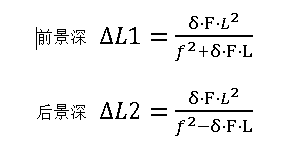
жҷҜж·ұО”L=О”L1+О”L2
ОҙпјҡејҘж•ЈеңҶзӣҙеҫ„пјӣ
f пјҡз„Ұи·қпјӣ
Fпјҡе…үеңҲFеҖјпјӣ
LпјҡжӢҚж‘„и·қзҰ»пјӣ
еҮҸе°Ҹе…үеңҲпјҲеўһеӨ§FеҖјпјүгҖҒеўһеҠ жӢҚж‘„и·қзҰ»гҖҒйҖүжӢ©е°Ҹз„Ұи·қй•ңеӨҙеқҮеҸҜдҪҝжҷҜж·ұеўһеҠ гҖӮ
3.и§Ҷеңәи§’пјҡ
е®ҡд№үпјҡд»Ҙйӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipй•ңеӨҙдёәйЎ¶зӮ№пјҢд»Ҙиў«жөӢзү©дҪ“йҖҡиҝҮй•ңеӨҙзҡ„иҫғеӨ§жҲҗеғҸиҢғеӣҙзҡ„дёӨиҫ№зјҳжһ„жҲҗзҡ„еӨ№и§’еҸ«еҒҡи§Ҷеңәи§’гҖӮ
и§Ҷеңәи§’зҡ„еӨ§е°ҸеҶіе®ҡдәҶй•ңеӨҙзҡ„и§ҶйҮҺиҢғеӣҙпјҢи§Ҷеңәи§’и¶ҠеӨ§пјҢи§ҶйҮҺе°ұи¶ҠеӨ§пјҢйӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipеҖҚзҺҮд№ҹе°ұи¶Ҡе°ҸгҖӮ
и§Ҷеңәи§’дёҺдј ж„ҹеҷЁе°әеҜёжңүе…іпјҢй•ңеӨҙзҡ„и§Ҷеңәи§’еә”ж ҮжҳҺж ҮеҮҶдј ж„ҹеҷЁе°әеҜёгҖӮ
д»ҘиҒ”еҗҲе…ү科16mm 2/3" 5M е®ҡз„Ұй•ңеӨҙ дёәдҫӢпјҡ
и§Ҷеңәи§’
пјҲеҜ№и§’Г—ж°ҙе№іГ—еһӮзӣҙпјү
еҜ№иұЎеӨ§е°Ҹ
пјҲеңЁжңҖиҝ‘еҜ№з„Ұи·қзҰ»еӨ„пјү
иЎЁ1пјҡ16mmй•ңеӨҙдј ж„ҹеҷЁдёҺи§ҶеңәеӨ§е°Ҹ
дҪҝз”ЁжҹҗдёҖж¬ҫзӣёжңәпјҢеңЁзӣёеҗҢе·ҘдҪңи·қзҰ»дёӢжӢҚж‘„пјҢдёҚеҗҢз„Ұи·қзҡ„й•ңеӨҙд№ҹдјҡжңүдёҚеҗҢзҡ„и§Ҷеңәи§’гҖӮ
еӣҫ5пјҡеҗҢж¬ҫзӣёжңәпјҢзӣёеҗҢе·ҘдҪңи·қзҰ»пјҢдёҚеҗҢз„Ұи·қзҡ„жӢҚж‘„ж•ҲжһңпјҲжіЁпјҡеӣҫдёӯжүҖж Үдёәж°ҙе№іи§Ҷеңәи§’пјү
и§Ҷеңәи§’дёҺз„Ұи·қжңүе…іпјҢеңЁдҪҝз”ЁзӣёеҗҢж„ҹе…үе…ғ件зҡ„жғ…еҶөдёӢпјҢжҗӯй…Қзҡ„й•ңеӨҙз„Ұи·қи¶Ҡй•ҝпјҢи§Ҷеңәи§’и¶Ҡе°ҸгҖӮ
еӣҫ6пјҡй•ңеӨҙз„Ұи·қдёҺи§Ҷеңәи§’
4.з•ёеҸҳ
е®ҡд№үпјҡй•ңеӨҙеҜ№иў«ж‘„зү©дҪ“жүҖжҲҗзҡ„еғҸзӣёеҜ№дәҺзү©дҪ“жң¬иә«зҡ„еӨұзңҹзЁӢеәҰз§°дёәз•ёеҸҳгҖӮ
зҗҶжғізҡ„й•ңеӨҙжҲҗеғҸпјҢзү©е№ійқўдёҺеғҸе№ійқўдёҠзҡ„ж”ҫеӨ§еҖҚзҺҮжҳҜеӣәе®ҡзҡ„пјҢдҪҶе®һйҷ…иҝҷдёҖжҖ§иҙЁеҸӘжңүеңЁеӣҫеғҸдёӯеҝғеҢәеҹҹзҡ„е°Ҹи§ҶеңәжүҚе…·еӨҮгҖӮеӣҫеғҸзҡ„ж”ҫеӨ§еҖҚзҺҮдјҡйҡҸзқҖи§ҶеңәеўһеӨ§иҖҢеҸҳеҢ–пјҢдҪҝжҲҗеғҸдә§з”ҹеӨұзңҹгҖӮ
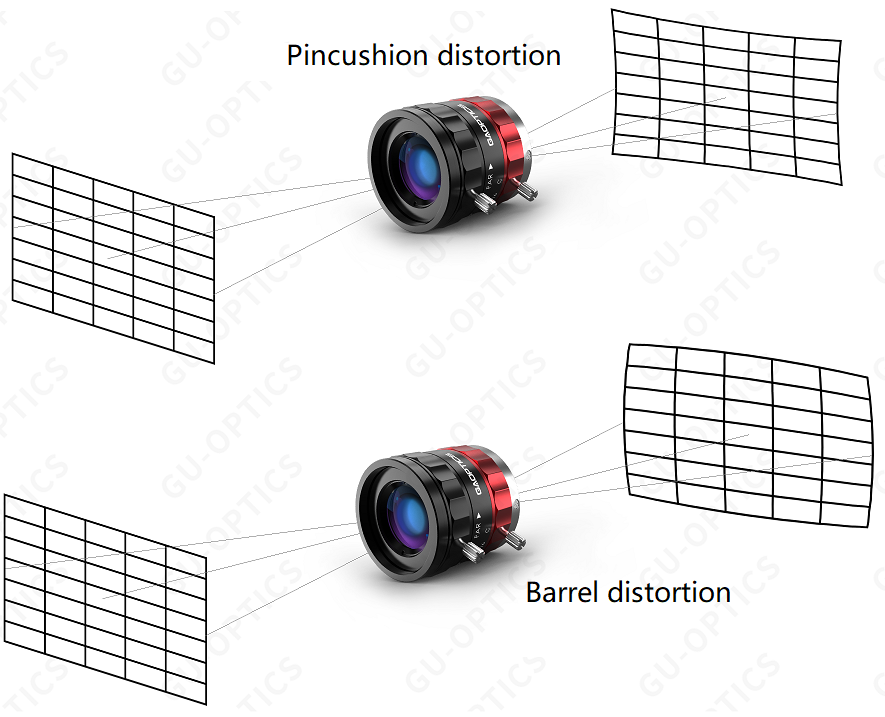
з•ёеҸҳйҖҡеёёеҲҶдёәдёӨз§Қпјҡ
жһ•еҪўз•ёеҸҳпјҡй•ңеӨҙжҲҗеғҸз”»йқўе‘Ҳеҗ‘дёӯй—ҙ收缩зҡ„еӨұзңҹзҺ°иұЎгҖӮ
жЎ¶еҪўз•ёеҸҳпјҡй•ңеӨҙжҲҗеғҸз”»йқўе‘ҲжЎ¶еҪўиҶЁиғҖзҠ¶зҡ„еӨұзңҹзҺ°иұЎгҖӮ
з•ёеҸҳдјҡдҪҝеӣҫеғҸеҸҳеҪўпјҢдҪҶдёҚеҪұе“ҚжҲҗеғҸеҲҶиҫЁзҺҮпјҢеҸҜд»ҘдҪҝз”ЁиҪҜд»¶ж ЎжӯЈгҖӮз•ёеҸҳзҺҮи¶ҠдҪҺиЎЁзӨәй•ңеӨҙзҡ„йӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipзҙ иҙЁи¶ҠеҘҪгҖӮ
еӣҫ7пјҡжһ•еҪўз•ёеҸҳдёҺжЎ¶еҪўз•ёеҸҳ
5.жңҖеӨ§дј ж„ҹеҷЁе°әеҜё
еҰӮдёӢеӣҫжүҖзӨәпјҢй•ңеӨҙеңЁеғҸе№ійқўзҡ„жҲҗеғҸжҳҜеңҶеҪўпјҢдҪҶжҺҘ收еӣҫеғҸзҡ„дј ж„ҹеҷЁйҖҡеёёдёәзҹ©еҪўпјҢжүҖд»ҘжңҖз»Ҳдҝқеӯҳзҡ„еӣҫеғҸжҳҜзҹ©еҪўгҖӮ
еӣҫ8,еңҶеҪўзӣёйқўдёҺзҹ©еҪўдј ж„ҹеҷЁ
д»ҘдёӢеӣҫдёәдҫӢпјҢй•ңеӨҙжҲҗеғҸе°әеҜёдјҡжҢүз…§йҖҡз”Ёдј ж„ҹеҷЁзҡ„е°әеҜёи®ҫи®ЎпјҢдҪҝеҫ—еңҶеҪўеғҸйқўеӨ–жІҝдёҺзҹ©еҪўдј ж„ҹеҷЁеӣӣи§’жӯЈеҘҪзӣёжҺҘпјҢиҝҷдёӘдј ж„ҹеҷЁе°әеҜёе°ұжҳҜиҜҘй•ңеӨҙзҡ„жңҖеӨ§дј ж„ҹеҷЁе°әеҜёпјҲдёӢеӣҫз»ҝиүІ2/3"дј ж„ҹеҷЁпјүгҖӮеҰӮжһңдҪҝз”ЁжӣҙеӨ§е°әеҜёзҡ„дј ж„ҹеҷЁпјҲдёӢеӣҫзҙ«иүІ1"дј ж„ҹеҷЁпјүеӣӣдёӘи§’дјҡеңЁй•ңеӨҙеңҶеҪўеғҸд№ӢеӨ–гҖӮдҪҝз”Ёжӣҙе°Ҹе°әеҜёзҡ„дј ж„ҹеҷЁпјҲдёӢеӣҫзІүиүІ1/1.8"дј ж„ҹеҷЁпјүпјҢдј ж„ҹеҷЁеҸӘйҮҮйӣҶеҲ°еңҶеҪўеғҸиҫғе°ҸеҢәеҹҹпјҢи§Ҷеңәе’Ңи§Ҷеңәи§’дјҡеҸҳе°ҸгҖӮ
еӣҫ9,11mmзӣҙеҫ„еғҸйқўдёҺдёҚеҗҢе°әеҜёдј ж„ҹеҷЁзҡ„еҢ№й…Қж•Ҳжһң
еёӮйқўдёҠйҖҡз”Ёдј ж„ҹеҷЁзҡ„еҗҚз§°иЎЁиҝ°пјҢж—ўдёҚжҳҜдј ж„ҹеҷЁзҡ„д»»дҪ•дёҖжқЎиҫ№й•ҝд№ҹдёҚжҳҜеҜ№и§’зәҝй•ҝеәҰпјҢиҝҷж ·зҡ„е°әеҜёж ҮжіЁйҡҫд»ҘеҪўжҲҗе…·дҪ“е°әеҜёзҡ„жҰӮеҝөгҖӮ
дёӢиЎЁжҳҜеёӮеңәдёҠеёёи§Ғзҡ„йҖҡз”Ёдј ж„ҹеҷЁе°әеҜёи§„ж јдҝЎжҒҜпјҢдј ж„ҹеҷЁеҜ№и§’зәҝй•ҝеәҰеҢ№й…Қй•ңеӨҙзҡ„еғҸйқўе°әеҜёзҡ„йӮЈж¬ҫдј ж„ҹеҷЁе°ұжҳҜй•ңеӨҙзҡ„жңҖеӨ§дј ж„ҹеҷЁе°әеҜёгҖӮ
иЎЁ2пјҢеёёи§ҒйҖҡз”Ёдј ж„ҹеҷЁ
6.еҮәзһіпјҢе…ҘзһідёҺеӯ”еҫ„е…үйҳ‘
еҮәзһіжҳҜйҷҗеҲ¶еҮәе°„е…үжқҹзҡ„жңүж•Ҳеӯ”еҫ„пјҢжҳҜеӯ”еҫ„е…үйҳ‘иў«еҗҺж–№йӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipзі»з»ҹжүҖжҲҗзҡ„еғҸпјӣеҮәзһіи·қзҰ»жҳҜеҮәзһідёҺй•ңеӨҙжңҖеҗҺдёҖдёӘй•ңзүҮиЎЁйқўзҡ„и·қзҰ»пјӣеҮәзһізӣҙеҫ„е°ұжҳҜеӯ”еҫ„е…үйҳ‘еҜ№еҗҺж–№йӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipзі»з»ҹжүҖжҲҗзҡ„еғҸзҡ„еӨ§е°ҸгҖӮ
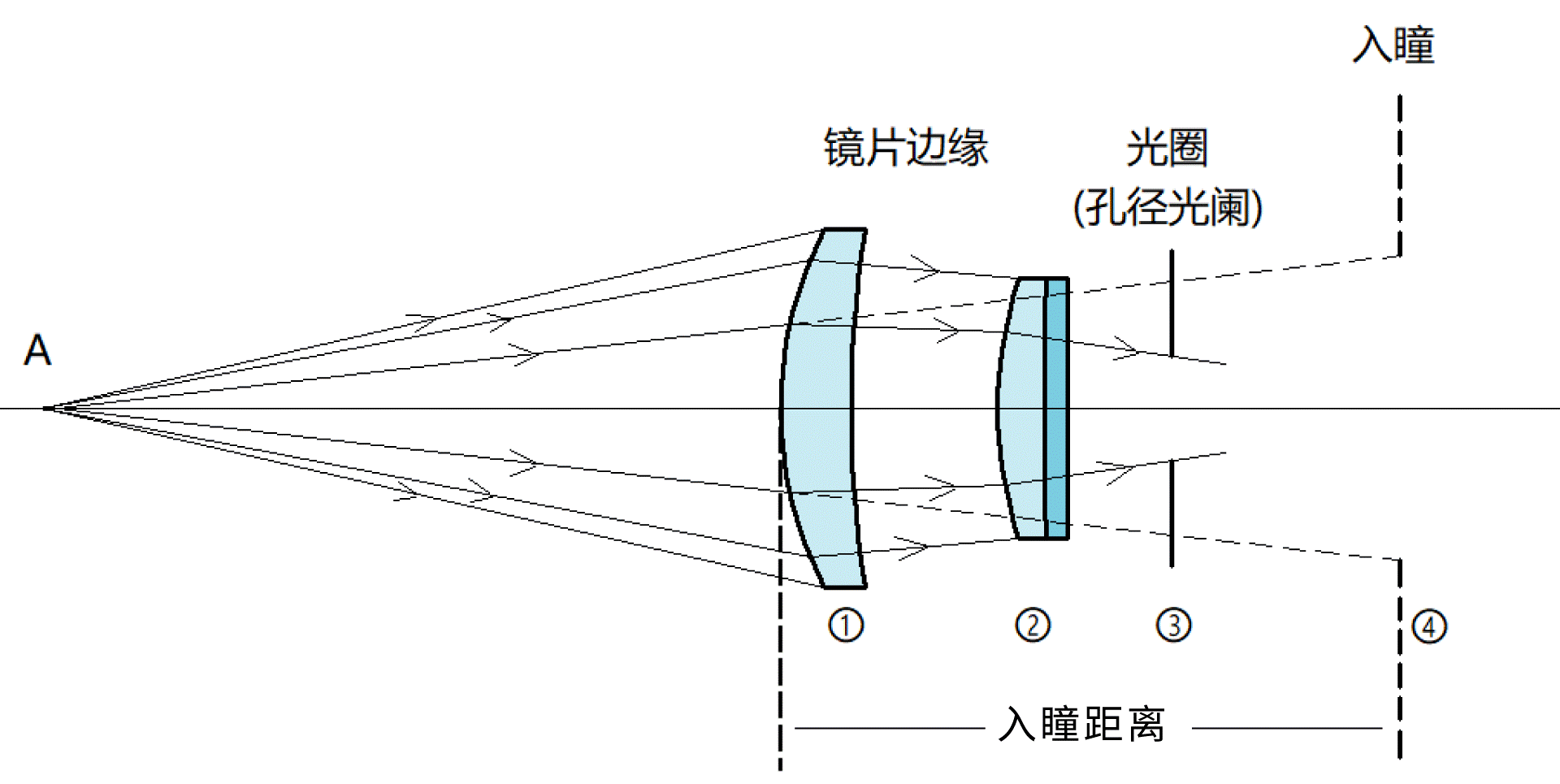
е…ҘзһіжҳҜйҷҗеҲ¶е…Ҙе°„е…үжқҹзҡ„жңүж•Ҳеӯ”еҫ„пјҢжҳҜеӯ”еҫ„е…үйҳ‘иў«еүҚж–№йӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipзі»з»ҹжүҖжҲҗзҡ„еғҸпјӣе…Ҙзһіи·қзҰ»жҳҜе…ҘзһідёҺй•ңеӨҙ第дёҖдёӘй•ңзүҮиЎЁйқўзҡ„и·қзҰ»пјӣе…Ҙзһізӣҙеҫ„е°ұжҳҜеӯ”еҫ„е…үйҳ‘еҜ№еүҚж–№йӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipзі»з»ҹжүҖжҲҗзҡ„еғҸзҡ„еӨ§е°ҸгҖӮ
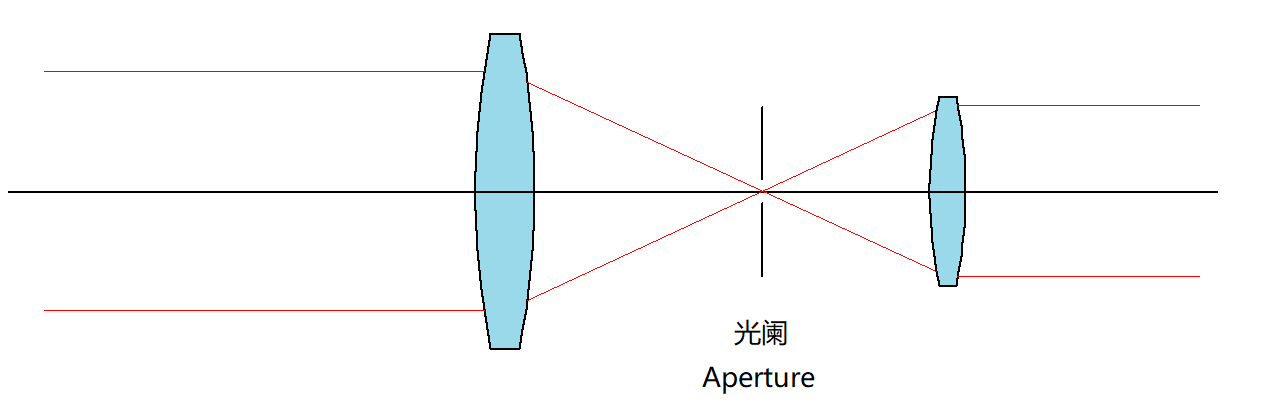
еӯ”еҫ„е…үйҳ‘пјҡе…үи·ҜдёӯжүҖжңүеҸҜд»ҘйҷҗеҲ¶е…үжқҹзҡ„ејҖеӯ”еұҸжҲ–иҖ…йҖҸй•ңиҫ№жЎҶйғҪеҸҜз§°дёәе…үйҳ‘пјҢе…¶дёӯжңҖз»ҲйҷҗеҲ¶е…үи·Ҝе…Ҙе°„е…үжқҹеӨ§е°Ҹзҡ„е…үйҳ‘з§°дёәеӯ”еҫ„е…үйҳ‘
еӣҫ,10пјҢе…ҘзһіпјҢе…Ҙзһіи·қзҰ»пјҢеӯ”еҫ„е…үйҳ‘
д»ҘдёҠеӣҫе…үи·ҜдёәдҫӢпјҢ1пјҢ2й•ңзүҮиҫ№зјҳпјҢ3е…үеңҲйғҪеҸҜд»ҘйҷҗеҲ¶е…Ҙе°„е…үжқҹпјҢеӣҫдёӯиғҪйҖҡиҝҮ1еҸ·й•ңзүҮзҡ„е…үжқҹеҸӘжңүдёҖйғЁеҲҶиғҪиҝӣе…Ҙ2еҸ·й•ңзүҮпјҢйҖҡиҝҮ2еҸ·й•ңзүҮзҡ„е…үжқҹеҸӘжңүдёҖйғЁеҲҶиғҪиҝӣе…Ҙ3еҸ·е…үеңҲпјҢжүҖд»Ҙ3еҸ·е…үеңҲжңҖз»ҲйҷҗеҲ¶иғҪиҝӣе…Ҙй•ңеӨҙжҲҗеғҸзҡ„е…үжқҹеӨ§е°ҸпјҢд№ҹе°ұжҳҜиҝҷдёӘе…үи·Ҝзҡ„еӯ”еҫ„е…үйҳ‘гҖӮеңЁAзӮ№и§ӮжөӢж—¶пјҢ3еҸ·е…үеңҲиў«1еҸ·е’Ң2еҸ·йҖҸй•ңж”ҫеӨ§жҲҗ4еҸ·иҷҡеғҸпјҢAзӮ№еҸ‘еҮәзҡ„е…үз»Ҹ1еҸ·2еҸ·йҖҸй•ңиҝӣе…Ҙ3еҸ·е…үеңҲпјҢдёҺе…үд»ҺAзӮ№зӣҙжҺҘиҝӣе…Ҙ4еҸ·зӯүж•ҲгҖӮжҠҠе…үеңҲеҜ№дёӨдёӘйҖҸй•ңжүҖжҲҗзҡ„4еҸ·еғҸз§°дёәе…ҘзһіпјҢе…ҘзһідёҺй•ңеӨҙ第дёҖдёӘй•ңзүҮд№Ӣй—ҙзҡ„и·қзҰ»е°ұжҳҜе…Ҙзһіи·қзҰ»гҖӮ
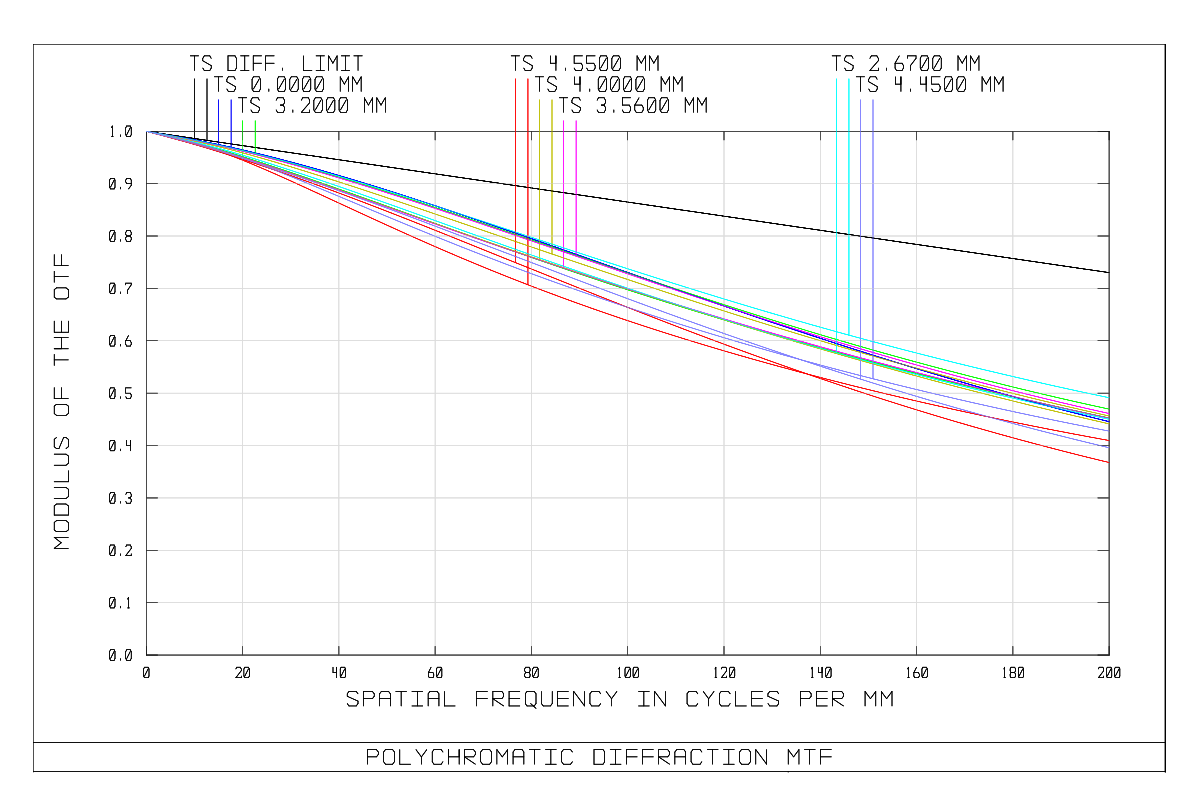
7.MTFжӣІзәҝе’ҢеҲҶиҫЁзҺҮпјҡ
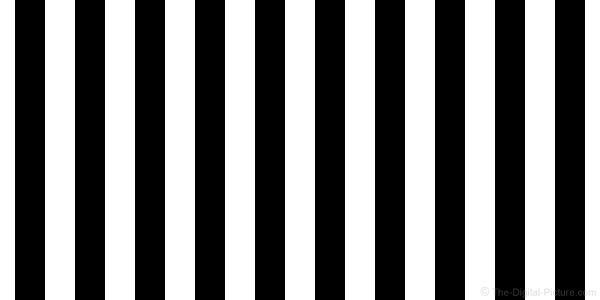
й•ңеӨҙзҡ„еҲҶиҫЁзҺҮжҳҜжҢҮй•ңеӨҙеҸҜд»ҘеҲҶиҫЁдёӨдёӘйқ иҝ‘зҡ„зӮ№зҡ„иғҪеҠӣпјҢд№ҹз§°дёәи§ЈжһҗеҠӣгҖӮй•ңеӨҙеҲҶиҫЁзҺҮйҖҡеёёдҪҝз”ЁMTFжӣІзәҝиЎЁеҫҒгҖӮMTFжӣІзәҝиЎЁзӨәз©әй—ҙйў‘зҺҮдёҺдј йҖ’еҮҪж•°еҖјзҡ„е…ізі»гҖӮжЁӘеқҗж ҮиЎЁзӨәз©әй—ҙйў‘зҺҮпјҢеҚіжҜҸmmзәҝеҜ№ж•°пјҢеҸҜд»Ҙд»ЈиЎЁдёӨдёӘзӮ№зҡ„йқ иҝ‘зЁӢеәҰгҖӮзәөеқҗж ҮиЎЁзӨәдј йҖ’еҮҪж•°д»ЈиЎЁеҜ№жҜ”еәҰпјҢж•°еҖјдёә1пјҢзәҝеҜ№еҜ№жҜ”жҳҺжҳҫпјҢеҸҜжё…жҷ°еҲҶиҫЁпјӣж•°еҖјдёә0пјҢзәҝеҜ№жІЎжңүеҸҚе·®ж— жі•еҲҶиҫЁгҖӮ
еӣҫ4,зәҝеҜ№еҜ№жҜ”еәҰ1е’Ң0.6зҡ„еӣҫеғҸ
еӣҫ5,жҹҗеһӢеҸ·й•ңеӨҙMTFжӣІзәҝ
еӣҫ5дёӯжңүеӨҡжқЎжӣІзәҝпјҢжҜҸжқЎжӣІзәҝйғҪж ҮжіЁеғҸй«ҳгҖӮ0mmиЎЁзӨәиҪҙдёҠMTFж•°еҖјпјҢ4.5mmиЎЁзӨәиҪҙеӨ–еғҸй«ҳ4.5mmзҡ„MTFж•°еҖјгҖӮдёҚеҗҢеғҸй«ҳзҡ„MTFжӣІзәҝи¶ӢеҠҝдёҖиҮҙжҖ§й«ҳпјҢдёҚеҲҶж•ЈпјҢиЎЁзӨәй•ңеӨҙиҪҙдёҠиҪҙеӨ–дёҖиҮҙжҖ§й«ҳгҖӮй»‘иүІзӣҙзәҝд»ЈиЎЁеҸ—зү©зҗҶжһҒйҷҗйҷҗеҲ¶зҡ„MTFж•°еҖјгҖӮ
дј ж„ҹеҷЁеҲҶиҫЁзҺҮдёҖиҲ¬жҢҮжЁӘеҗ‘дёҺзәөеҗ‘еғҸзҙ ж•°д№ҳз§ҜпјҢеҰӮ500дёҮеғҸзҙ пјҢдј ж„ҹеҷЁжЁӘеҗ‘дёҺзәөеҗ‘еғҸзҙ ж•°дёә2560Г—1920гҖӮеҚ•дёӘеғҸзҙ еҚіеғҸе…ғзҡ„е°әеҜёпјҢдёҺдј ж„ҹеҷЁзҡ„е°әеҜёе’ҢеҲҶиҫЁзҺҮзӣёеҜ№еә”гҖӮеҸҜд»Ҙж №жҚ®иЎЁ1дј ж„ҹеҷЁе°әеҜёйҷӨд»ҘеғҸзҙ ж•°йҮҸпјҢеҫ—еҲ°еғҸе…ғе°әеҜёгҖӮеҰӮ2/3вҖң 500дёҮдј ж„ҹеҷЁпјҢеғҸе…ғе°әеҜё3.4ОјmгҖӮй•ңеӨҙзҡ„еҲҶиҫЁзҺҮеә”дёҺеғҸе…ғе°әеҜёеҢ№й…ҚгҖӮйҖҡеёёжҢүз…§зәҝеҜ№е°әеҜёзҡ„дёҖеҚҠйҖүжӢ©еғҸе…ғе°әеҜёгҖӮ
д»Ҙ1/1.8вҖңе°ҸеғҸе…ғй•ңеӨҙдёәдҫӢпјҢжҳҜ230lp/mmй«ҳеҲҶиҫЁзҺҮи®ҫи®ЎпјҢзәҝеҜ№е°әеҜё1000/230Ојm=4.34ОјmпјҢеҢ№й…ҚеғҸе…ғе°әеҜёдёә4.24/2Ојm=2.17ОјmпјҢеҸҜд»ҘеҢ№й…ҚеёӮйқўдёҠ2.2Ојmзҡ„дј ж„ҹеҷЁгҖӮйҖүжӢ©жҜ”2.2Ојmе°Ҹзҡ„еғҸе…ғпјҢ并дёҚиғҪеёҰжқҘжӣҙдё°еҜҢзҡ„з»ҶиҠӮ
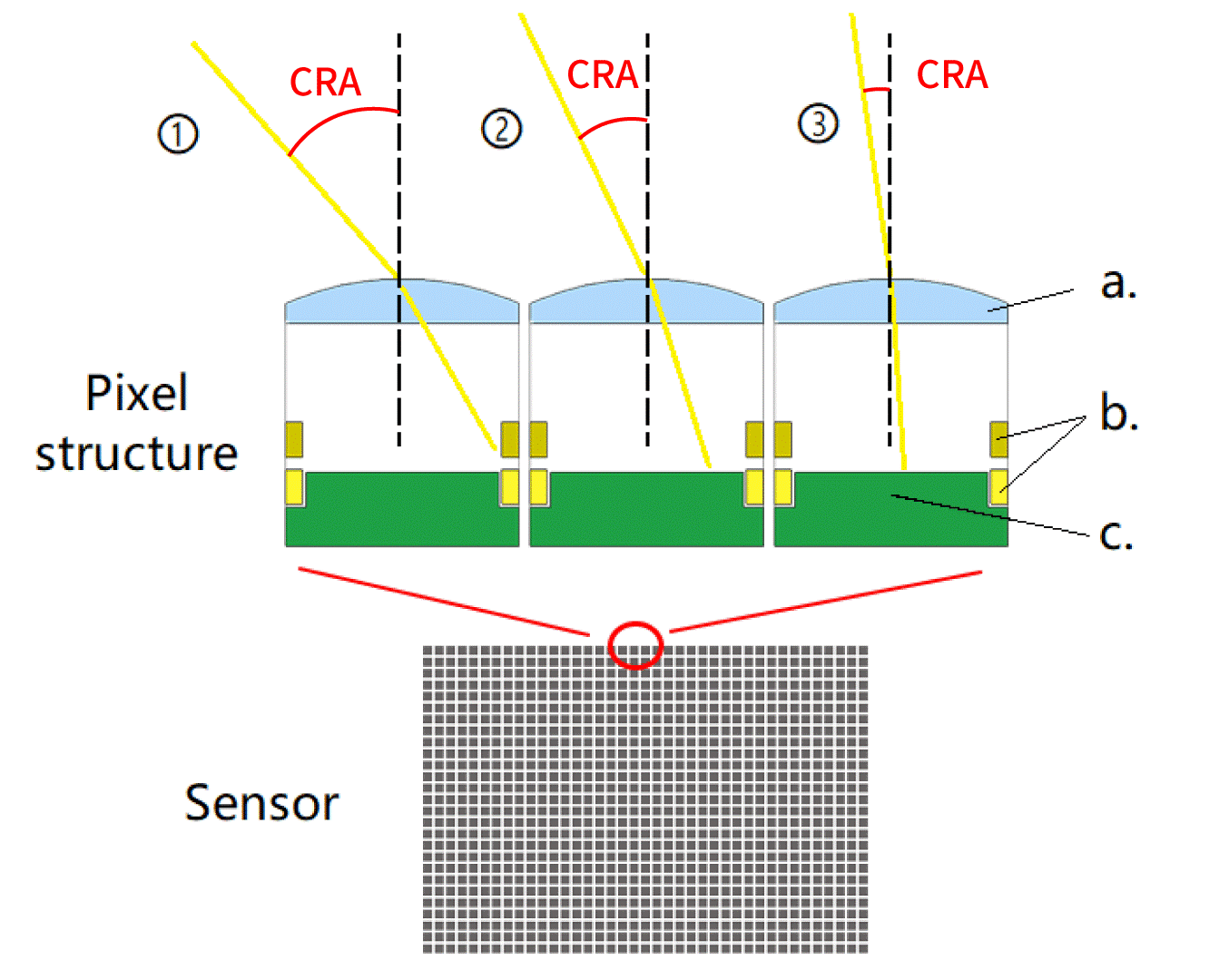
8.дё»е…үи§’
й•ңеӨҙдё»е…үи§’CRAпјҲChief Ray AngleпјүпјҢиЎЁзӨәй•ңеӨҙдё»е…үзәҝдёҺе…үиҪҙзҡ„еӨ№и§’гҖӮдё»е…үзәҝжҳҜд»Һиў«и§ӮжөӢзү©дҪ“еҸ‘е°„пјҢз»Ҹеӯ”еҫ„е…үйҳ‘зҡ„дёӯеҝғеҲ°жҲҗеғҸзҡ„е…үзәҝгҖӮ
дј ж„ҹеҷЁдё»е…үи§’CRAпјҢиЎЁзӨәеҸҜд»ҘиҒҡз„ҰеҲ°еғҸзҙ дёҠзҡ„е…үзәҝзҡ„жңҖеӨ§и§’еәҰгҖӮи¶…иҝҮжӯӨи§’еәҰзҡ„е…үжқҹдёҚиғҪе®Ңе…Ёиў«дј ж„ҹеҷЁжҺҘ收гҖӮдёҖиҲ¬иҰҒжұӮй•ңеӨҙCRAдёҚеӨ§дәҺзӣёжңәдј ж„ҹеҷЁCRA
еӣҫ6,дј ж„ҹеҷЁдё»е…үи§’
a.еғҸзҙ дёҠж–№иҒҡе…үйҖҸй•ңпјҢb.йҮ‘еұһеҜјзәҝпјҢc.е…үз”өиҪ¬жҚўеҢәеҹҹгҖӮ
еӣҫдёӯ1еҸ·е…үзәҝдё»е…үи§’и¶…иҝҮдј ж„ҹеҷЁCRAпјҢе…үзәҝж— жі•еҲ°иҫҫе…үз”өиҪ¬жҚўеҢәеҹҹпјӣ2еҸ·3еҸ·дё»е…үи§’е°ҸдәҺдј ж„ҹеҷЁCRAпјҢе…үзәҝеҸҜд»ҘеҲ°иҫҫе…үз”өиҪ¬жҚўеҢәеҹҹгҖӮ
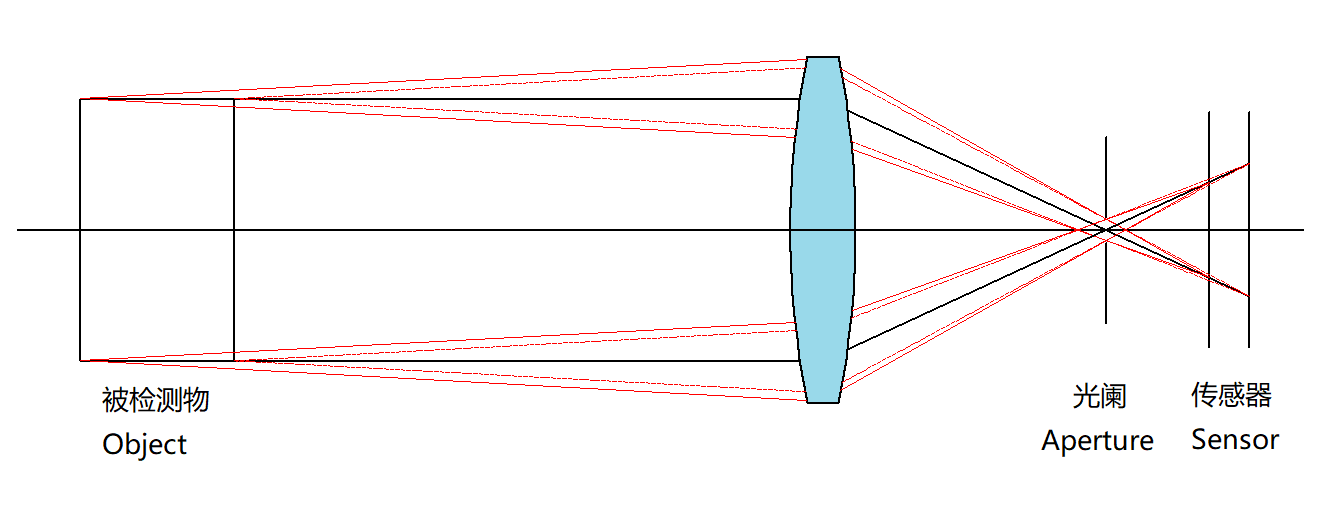
9.иҝңеҝғе…үи·Ҝз»“жһ„дёҺиҝңеҝғеәҰ
иҝңеҝғе…үи·Ҝжңүзү©ж–№иҝңеҝғпјҢеғҸж–№иҝңеҝғе’ҢеҸҢиҝңеҝғдёүз§Қз»“жһ„гҖӮ
еӣҫ7,зү©ж–№иҝңеҝғе…үи·Ҝ
еӯ”еҫ„е…үйҳ‘еңЁеғҸж–№з„Ұе№ійқўдёҠпјҢиҝӣе…Ҙй•ңеӨҙзҡ„дё»е…үзәҝйғҪйҖҡиҝҮе…үйҳ‘дёӯеҝғзҡ„еғҸж–№з„ҰзӮ№пјҢеңЁзү©ж–№иҝҷдәӣдё»е…үзәҝйғҪе№іиЎҢдәҺе…үиҪҙгҖӮеҚіеҸӘжңүе№іиЎҢдәҺе…үиҪҙзҡ„е…үзәҝжүҚиғҪйҖҡиҝҮе…үйҳ‘пјҢиў«жөӢзү©и·қзҰ»й•ңеӨҙиҝңиҝ‘пјҢжҲҗеғҸеӨ§е°ҸдёҖиҮҙгҖӮ
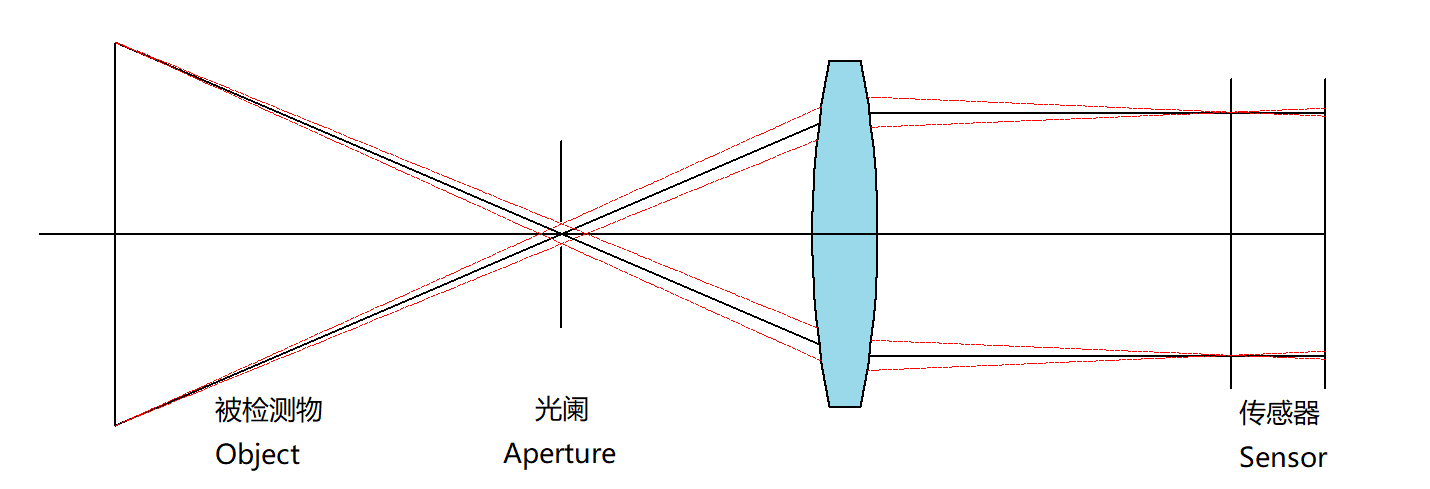
еӣҫ8пјҢеғҸж–№иҝңеҝғе…үи·Ҝ
еӯ”еҫ„е…үйҳ‘еңЁзү©ж–№з„Ұе№ійқўдёҠпјҢиҝӣе…Ҙй•ңеӨҙзҡ„дё»е…үзәҝйғҪйҖҡиҝҮе…үйҳ‘дёӯеҝғзҡ„зү©ж–№з„ҰзӮ№пјҢеңЁеғҸж–№иҝҷдәӣдё»е…үзәҝйғҪе№іиЎҢдәҺе…үиҪҙгҖӮйҖҡиҝҮе…үйҳ‘зҡ„е…үзәҝйҖҡиҝҮй•ңеӨҙйғҪе№іиЎҢдёҺе…үиҪҙпјҢдј ж„ҹеҷЁдёҺй•ңеӨҙи·қзҰ»дёҚеҪұе“ҚжҲҗеғҸеӨ§е°ҸгҖӮ
еӣҫ9пјҢеҸҢиҝңеҝғе…үи·Ҝ
е…үйҳ‘жүҖеңЁзҡ„е№ійқўпјҢж—ўжҳҜзү©ж–№з„Ұе№ійқўпјҢд№ҹжҳҜеғҸж–№з„Ұе№ійқўгҖӮзү©ж–№дё»е…үзәҝдёҺеғҸж–№дё»е…үзәҝйғҪе№іиЎҢдәҺе…үиҪҙгҖӮ
иҝңеҝғеәҰпјҡиҝңеҝғй•ңеӨҙдё»е…үзәҝеҒҸзҰ»дәҺе…үиҪҙзҡ„и§’еәҰпјҢи§’еәҰи¶Ҡе°ҸиҝңеҝғеәҰи¶ҠеҘҪпјҢжҲҗеғҸзҡ„еҖҚзҺҮиҜҜе·®е°ұи¶Ҡе°ҸпјҢжөӢйҮҸд№ҹе°ұи¶ҠзІҫзЎ®гҖӮ
10.еҚЎеҸЈ
дё»жөҒе·Ҙдёҡй•ңеӨҙдёҖиҲ¬дҪҝз”ЁCеҚЎеҸЈпјҢеҚЎеҸЈиһәзә№M25.4x0.8
е…·дҪ“еҗҚз§°е’ҢпјҢеҜ№еә”жі•е…°и·қпјҢд»ҘеҸҠиһәзә№е°әеҜёиҜ·и§ҒдёӢиЎЁпјҡ жңәиә«зӣёеңәе®ҡдҪҚ(жі•е…°)и·қзҰ»
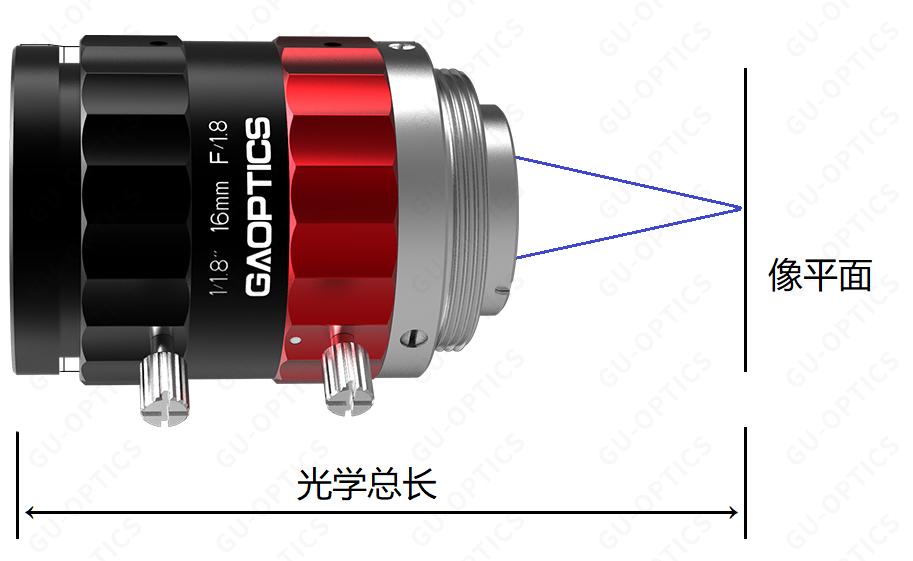
11.йӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipжҖ»й•ҝдёҺеҸҳз„ҰпјҢи°ғз„Ұ
й•ңеӨҙ第дёҖзүҮй•ңзүҮиЎЁйқўеҲ°еғҸе№ійқўзҡ„и·қзҰ»е°ұжҳҜй•ңеӨҙзҡ„йӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipжҖ»й•ҝгҖӮ
еӣҫ10пјҢйӣ·з«һжҠҖдёӢиҪҪжүҫray666зӮ№vipжҖ»й•ҝзӨәж„Ҹеӣҫ
д»ҘдёҠжҳҜжҲҗеғҸй•ңеӨҙзҡ„еҸӮж•°еҗҚиҜҚи§ЈйҮҠеӣҫж–ҮиҜҙжҳҺпјҢеҹәжң¬ж¶өзӣ–дәҶж—Ҙеёёе·ҘдҪңдёӯжүҖиғҪйҒҮеҲ°зҡ„еҗ„зұ»й•ңеӨҙзӣёе…ізҡ„дё“дёҡжңҜиҜӯгҖӮ
гҖҗиҒ”еҗҲе…ү科гҖ‘гҖҗжҲҗеғҸе…ғ件гҖ‘

.png)

.png)






 еҸ‘иЎЁдәҺ 2022-3-15 11:25
еҸ‘иЎЁдәҺ 2022-3-15 11:25
 еҸ‘иЎЁдәҺ 2022-4-26 15:36
еҸ‘иЎЁдәҺ 2022-4-26 15:36